VSI Motion Control API
The VSI Motion Control API allows you to develop custom PC-based applications that can seamlessly communicate with the motion controller over Ethernet to perform sophisticated motion sequences and I/O control. The API is a set of native Windows libraries designed as a simple yet comprehensive motion control interface for VSI Ethernet Motion Controllers such as the DSPMC and HiCON Integra. Your custom application can be written in C/C++ or any .NET languages.
API Features
- Compact Native Libraries
- Cross-platform support
- Simplified program flow for ease of integration
- Verbose Debugging Console
- High-Speed UDP network communication
- Single-Axis or Coordinated Multi-Axis Motion Control
- Multiple motion modes: Relative, Absolute, Velocity
- GCode Support (NEW!)
The VSI Motion Control API libraries are made in native C/C++ which allow them to be integrated into any kind of application platform (C/C++ or .NET).
The VSI Motion Control API libraries are designed for minimal porting to provide compatibility across multiple platforms.
The hardware abstraction layer handles most “lower-level” operations, such as network communication and motion control, leaving the user with invoking only the necessary control functions.
The VSI Motion Control API has built-in functionality to open a console window which prints all messages and notifications.
Communication with VSI Motion Controllers is handled via Ethernet through the use of UDP transmission. This ensures high-speed, low-latency, and lossless data integrity. Command Data and Status data can be exchanged at a minimum rate of 5ms for extremely fast response times.
Single-Axis Control allows the user to manipulate each axis one by one. Each axis is controlled independently from the others allowing the user to manually synchronize motion. Coordinated Multi-Axis control allows the user to move multiple axes at once in a coordinated Linear (G0 or G1), or Arc (G2 or G3) trajectory with a specified trajectory velocity and acceleration.
Relative motion moves an axis to a specified target position in relation to the current position. Absolute motion moves an axis to an absolute target position. Velocity motion moves an axis indefinitely in the given direction.
The SDK has recently added the power of a GCode interpreter. Command motion with the powerful and familiar GCode language.
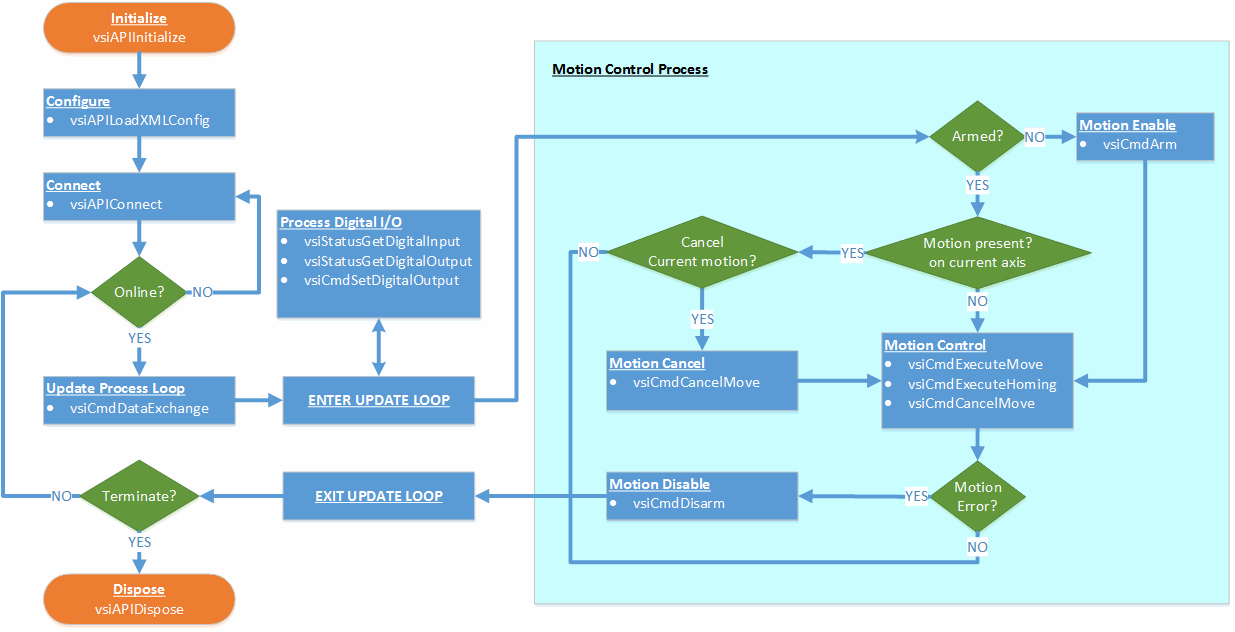
Program Flowchart
EtherCAT Support
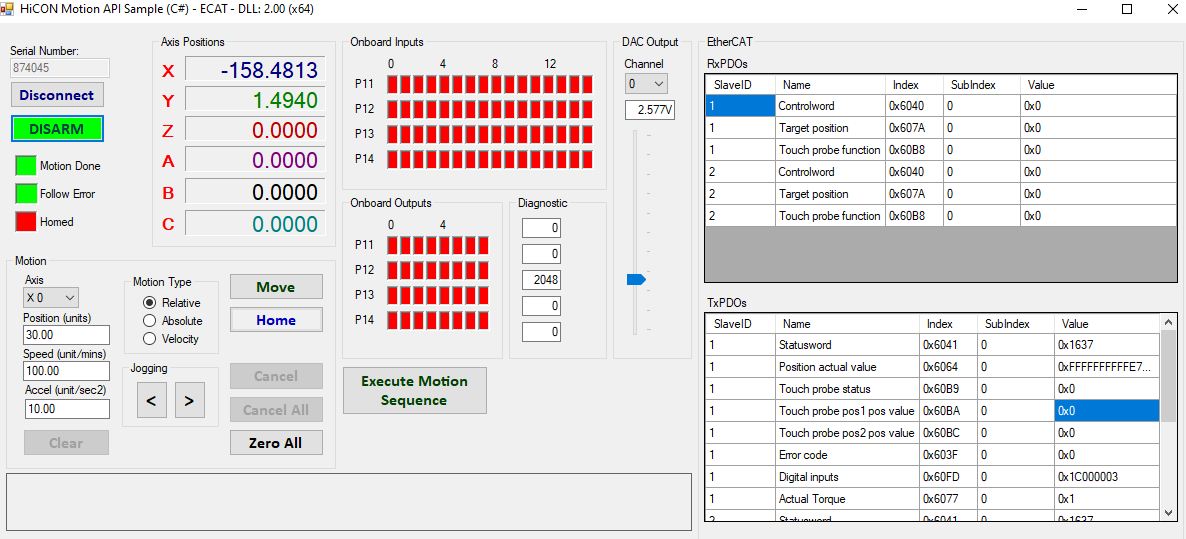
The SDK has been updated with support for our EC01 EtherCAT Motion Controller. In Combination with the EC01, you can:
- Command up to 12 motors
- Retrieve runtime data from drives such as Torque
- Manipulate large amounts of IO
Sample Projects
C# Sample Projects
- EtherCATMotionAPI_Sample(C#)
- DSPMCMotionAPI_Sample(C#)
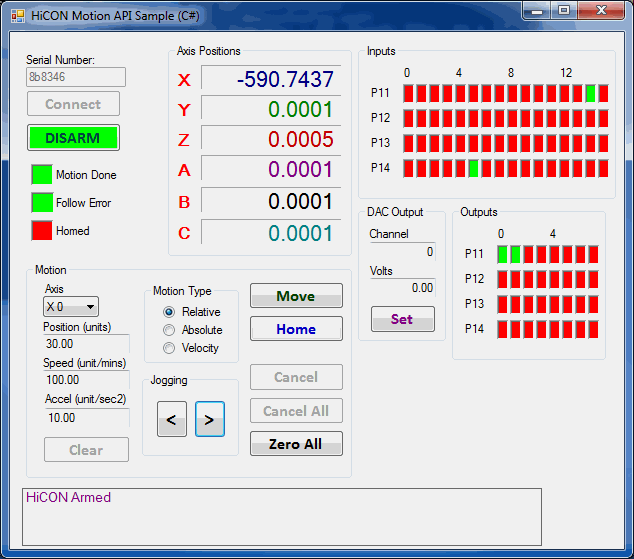
- HiCON Motion API Sample(C#)
- HiCON Simple Buffered Motion Sample(C#)
This example shows how to properly interface and operate with the HiCON. It also makes use of most features such as Digital and Analog I/O manipulation, motion, and more. Users will find this sample particularly helpful for a good starting point.
This example shows how to use the Buffered motion trajectory which is the most powerful and flexible means of performing motion control.
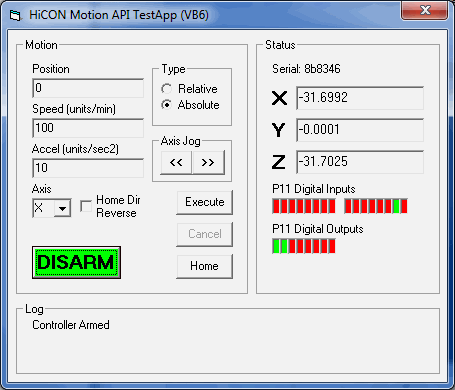
VB6 Sample Projects
VB.NET Sample Projects
- HiCON Motion API Sample(VB.NET)
This example shows how to properly interface and operate with the HiCON. It also makes use of most features such as Digital and Analog I/O manipulation, motion, and more. Users will find this sample particularly helpful for a good starting point.